Company News
Sep 20, 2016
University of Washington use Shadow Dexterous Hand in award winning research
University of Washington use Shadow Dexterous Hand
in award winning research
Here at Shadow, we love working with people and organisations to develop solutions that will progress their research. The University of Washington (UW), got in touch with us a few years ago to purchase a Shadow Dexterous Hand and carry out research upon it as part of the ADROIT project.
The ADROIT project looks to explore dexterous hand manipulation, one of the most complex types of biological movement which has proven very difficult to replicate in robots.
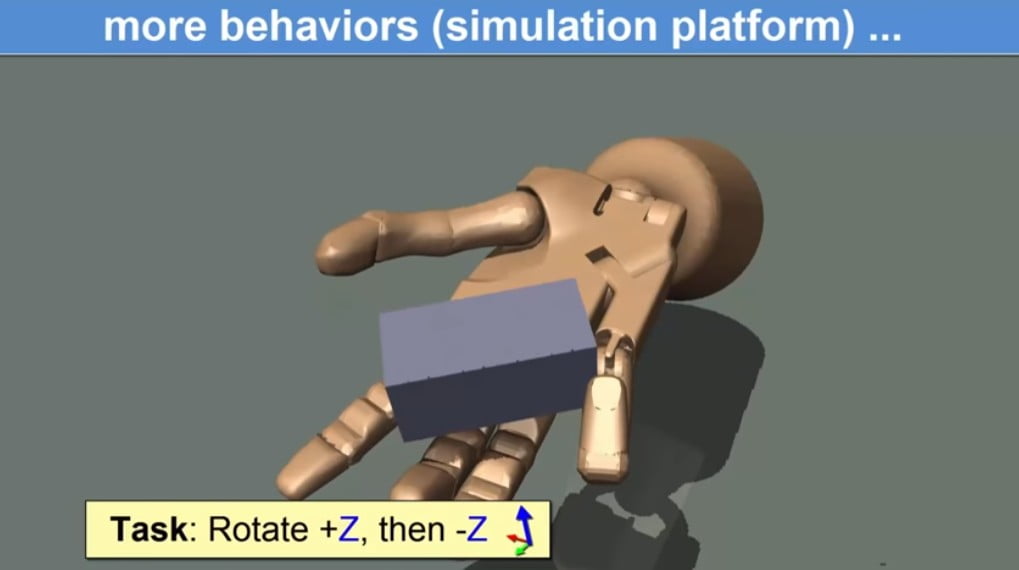
Dexterous manipulation is so sensitive to small variations in contact force and object location that it seems to require online planning without any simplifications. The UW team demonstrated online planning (or model-predictive control) with a full physics model of a humanoid hand, with 28 degrees of freedom and 48 pneumatic actuators. They then augmented the actuation space with motor synergies which sped up optimization without removing flexibility. Most of the results are in simulation, showing nonprehensile object manipulation as well as typing. In both cases the input to the system is a high level task description, while all details of the hand movement emerge online from fully automated numerical optimization.
For all of this research, the UW team use a modified Dexterous Hand, equipping it with their data to make the Hand faster and with more compliant actuation.
We’re so pleased for the UW team – they won the Best Manipulation Paper at ICRA (you can read their winning paper here). One of their doctoral students, Vikash Kumar, also defended his PhD last week, rounding off a particularly successful time for him. He said “I want to take a moment and extend my gratitude towards the help and support I received from you guys and the Shadow Robot Company as a whole.”
Our dexterous hands are widely sought after from academia, who use the hands for research purposes. With the Shadow Dexterous Hand, we have taken a truly anthropomorphic approach to robot manipulation. The Hand has 20 actuated degrees of freedom, absolute position and force sensors, and ultra sensitive touch sensors on the fingertips, the Hand provides unique capabilities for problems that require the closest approximation of the human hand currently possible. The Hand uses industry standard interfaces and can be used as a tele-operation tool or mounted on a range of robot arms as part of a robot system.
For more information about how our Dexterous Hand could benefit your research, get in touch with us at hand@shadowrobot.com.