Company News
Aug 21, 2019
iPlanR PROJECT
iPlanR stands for Intelligent Motion Planning for Robotics. We teamed up with the University of Edinburgh (UoE) to dive deeper into how we can use the Robot Operating System (ROS) to solve motion planning problems in robotics.
This project features our Smart Grasping System which includes our 3 fingered Modular Grasper. The development of the Modular Grasper was supported by the European Commission under contracts H2020-FoF-2016.723853 (COROMA) and H2020-PHC-2014-single-stage (RAMCIP)
 Modular Grasper
Modular Grasper
Project Title:
iPlanR
Project Duration:
2018-2019
Project Facilitators:

Project Collaborators:

Project Overview:
One of the most fundamental elements of Shadow Robot’s roadmap towards a disruptive universal grasping system is to be able to plan a trajectory reliably in different environments. There are a number of approaches to motion planning suitable for use by dexterous robots deployed in complex workspaces. These have not made the transition from the lab to the field because whilst each of them offers some capabilities, each also has significant deficiencies.
This project is a benchmarking driven feasibility investigation into the deployment of diverse modern planners to the motion planning problem. Focusing on a set of planning problems – both generic across robotics deployment and business specific to the Shadow Robot Company – different planning tools will be evaluated. We will use the existing ROS and MoveIt! framework as they are heavily used in our work.
Project Details:
Moveit!, apart from its main functionality, offers a benchmarking software framework for motion planning algorithms based on the capabilities already available in OMPL. It is capable of benchmarking any planner that has a plugin available for it, including all the available planning algorithms that currently exist within OMPL, any other of the current planners compatible with Moveit! (such as SBPL or CHOMP) or new algorithms that has a Moveit! plugin available.
Within the iPlanR project, we further enhanced Moveit! capabilities by:
- Modifying elements to:
- Properly import and export queries using Rviz and that have been saved to the warehouse
- Enable to define the queries in both joint space and cartesian space
- An option to create automatically a set of random queries that are collision free for a specific scene
- Improve the generation of plots to export to pdf to allow better visualization by implementing a Graphical User Interface (GUI).
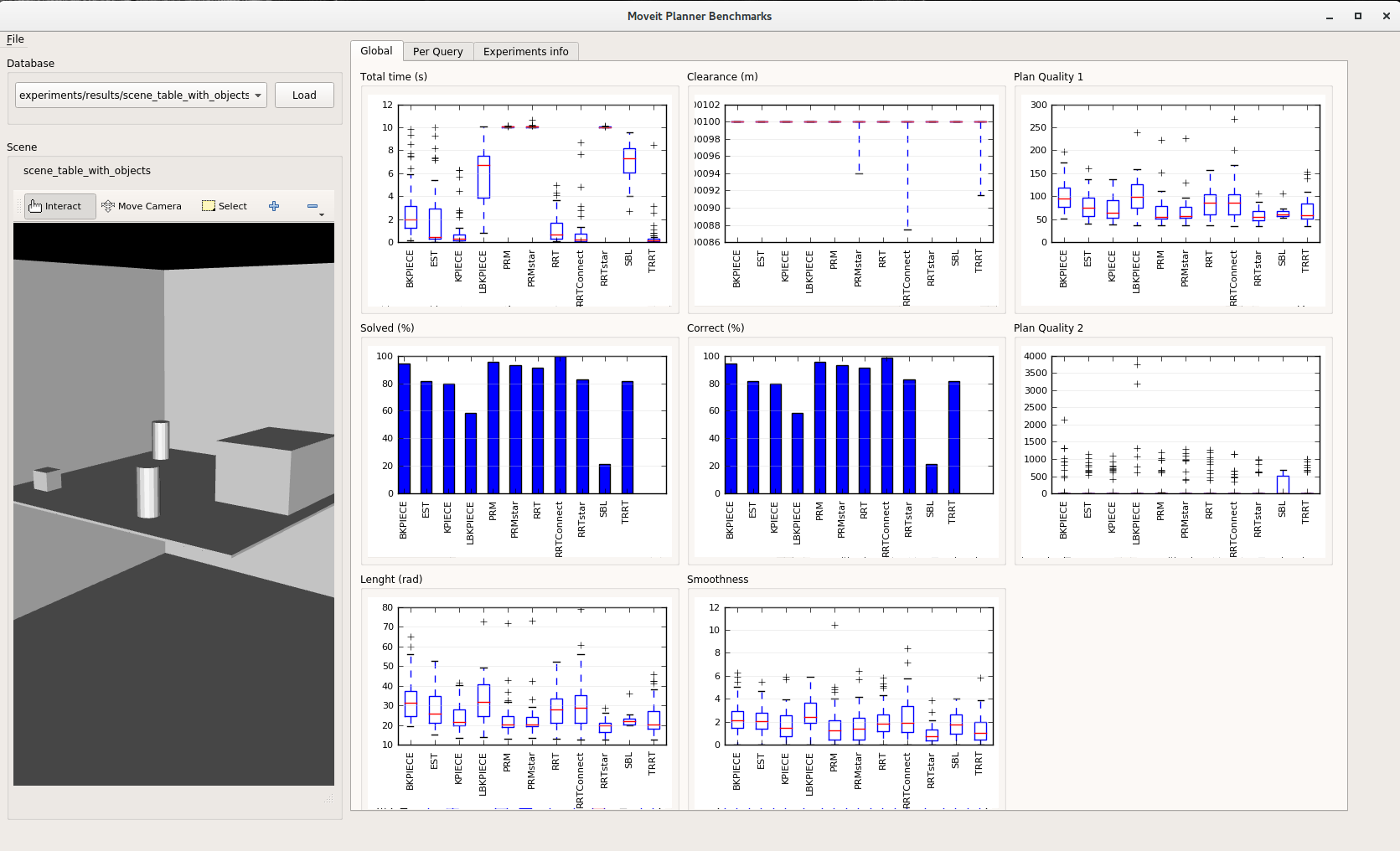
Improvements made by implementing a GUI include:
- Showing information about the experiments performed on the selected database and information about the benchmark metrics used in the graphs.
- Displaying several graphs in one screen summarizing the results for each planner
- Displaying the results per each query selecting a specific planner which will be useful to analyse the output of the different quality metrics
2. Define and implement two more measures to quantify the quality of the different plans:
- Plan quality 1: Calculated by a weighted sum of angles travelled by each of the joints, giving higher weights to the joints closer to the base of the robot, thus penalizing them as small movements of these joints will result in bigger movements of the end effector.
- Plan quality 2: Measures how different is the total distance travelled by the arm end effector to the most direct path between the start and goal position.
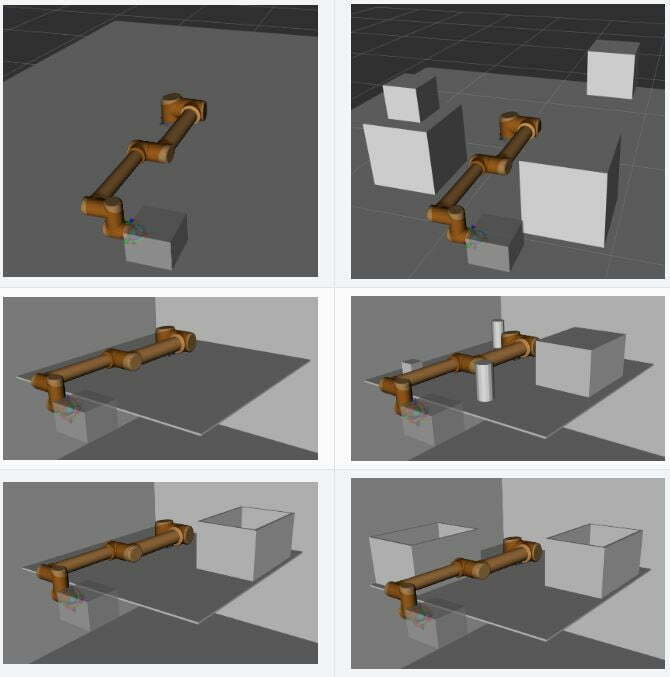
3. Creating a set of scenes related specifically with arm movements in manipulation environments
Different set of queries were defined in each scenario with difficult levels of difficulty with the intention of testing the performance of the planners. Additionally, a set of valid random queries were generated in each scenario to validate the results of each planner.
These sets of benchmark problems intend to help the community as a starting point and we encourage researchers to contribute with more scenes and queries that exercise other capabilities of planners.
Project Conclusions:
iPlanR provides a solid next-generation benchmarking suite for motion planning algorithms, which can be disseminated to the wider community through EuRobotics standardisation activity, and actively promoted to researchers as a way to test and explore their algorithms.
iPlanR improves the performance of the motion planning part of the grasping system making it more adaptable and meaning that clients will be able to deploy the same hardware across a wide range of tasks, rather than sourcing, qualifying and stocking a diverse collection of tooling. This has significant benefits by making it quicker/easier for them to deploy and maintain those systems, as well as making it possible for these systems to perform a wider range of automation needs.
Going Forward:
We identified a group of manufacturers with in-house robotics deployment and development capabilities, who were keen to engage with the SGS capability and would benefit significantly from the iPlanR project outputs. We are currently prioritising handling scenarios from Intra-logistics and Automotive industries. However, Production Line Testing and Pharma Lab Automation are other potential use cases that we are exploring.
If you have any questions regarding the project or any of our products, feel free to get in touch by emailing contact@shadowrobot.com or calling us on +44 (0)20 7700 2487